Instructie video
Hierbij een instructie video om eventueel meer uitleg te bieden op een visuele manier.
Quinten Verept - 6I²CT 11
Ik ben Quinten Verept en student op de middelbare school GTI te Beveren. Als studierichting volg ik industriele ICT omdat ik hier een verdere toekomst in zie in zowel verdere studie als werk. In mijn vrije tijd houd ik mij bezig met mijn hobbies, deze zijn fitness en padel.
De bedoeling van dit eindwerk is om de helm zo goed mogelijk te maken met een werkende functie waaronder meer het openen en sluiten van het masker, maar ook de camera die ik hierin ga verwerken.
De werking zal vooral gebeuren door de vele servomotoren die aangestuurd zullen worden door een Raspberry Pi. Deze zullen gevoed worden door een powerbank of batterijen. Ook wordt de helm voorzien van 2 led strips voor de ogen en een camera (Pi Cam).
Het is vooral de bedoeling dat de helm aan de voorkant soepel open kan gaan in meerdere delen, waarna hij ook terug moet kunnen sluiten zonder te veel moeite. De codering voor de Raspberry Pi is ook een pittige opdracht wegens de vele aansturingen en dergelijke.

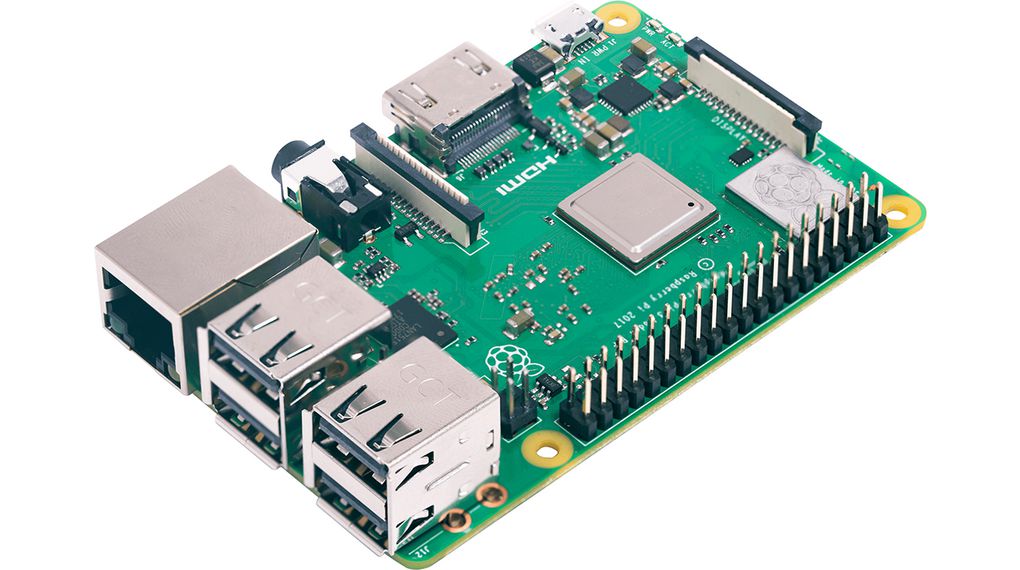
De Raspberry Pi 3 Model B+ is een verbeterde versie van de Raspberry Pi 3 Model B. Hij is gebaseerd op de BCM2837B0 system-on-chip (SoC), die een 1,4 GHz quad-core ARMv8 64bit processor en een krachtige VideoCore IV GPU bevat .

De Raspberry Pi Cam is een klein camera module met een resolutie van 8 megapixel. De cameramodule wordt aangesloten op het Raspberry Pi-bord via de CSI-connector die speciaal is ontworpen voor interfacing met camera's. De CSI-bus is in staat tot extreem hoge gegevenssnelheden en voert uitsluitend pixelgegevens naar de processor.

De Micro servo motor is klein en zeer lichtgewicht. Het heeft ook een zeer hoog uitgangsvermogen. De servo kan ongeveer 180 graden draaien (90 in elke richting) en werkt net als de standaard soorten maar kleiner. De servo wordt gevoed met een 3,3V pin en staat in verbinding door middel van een GPIO-pin van de Raspberry Pi.
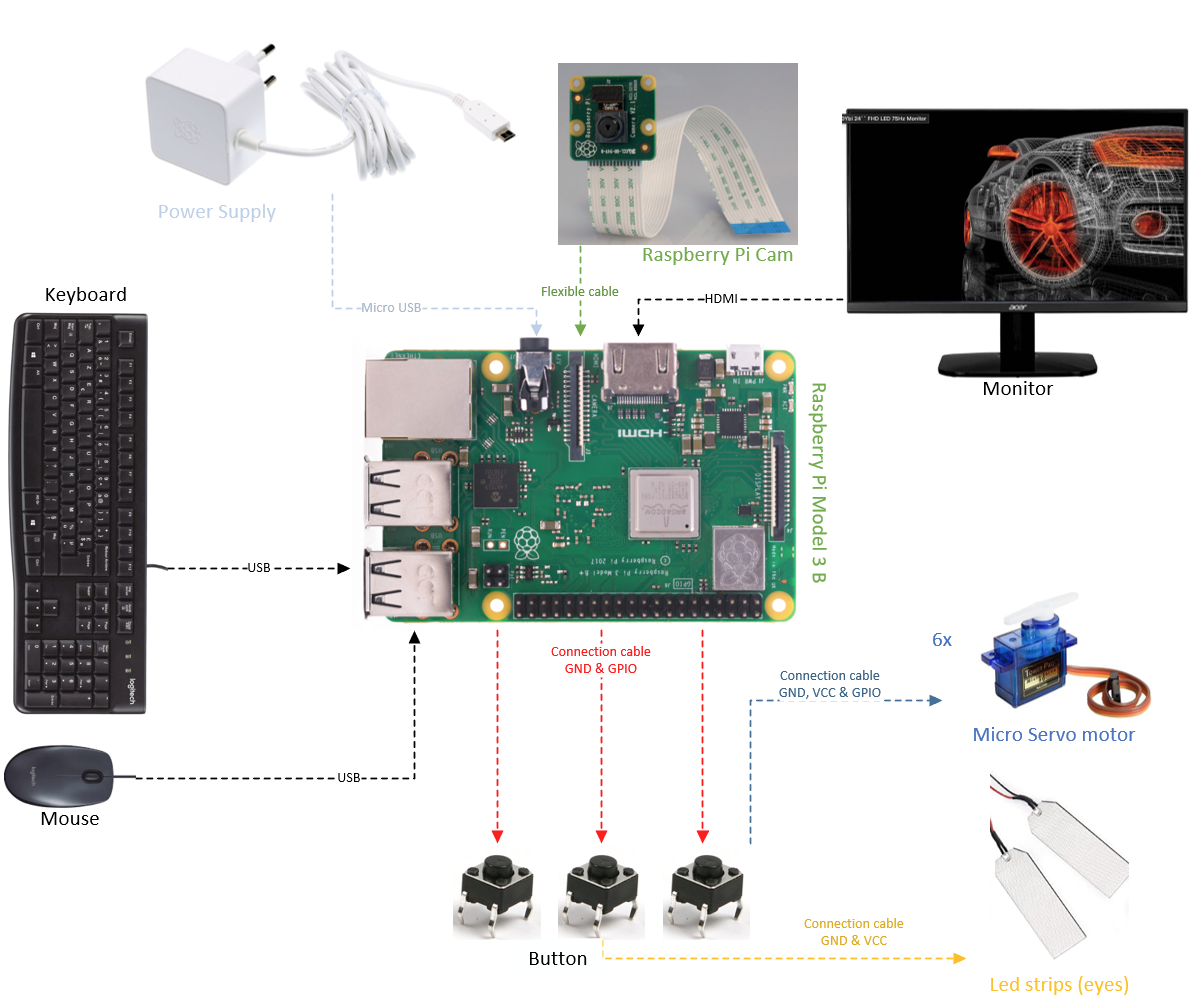
In dit blokschema kunnen we op een beknopte wijze mijn opstelling wat volgen. Het centrale punt in dit schema is de Raspberry Pi die eigenlijk voor alle communicatie zorgt voor de verschillende componenten. Zo zal ik door gebruik te maken van de programmeertaal Python de componenten besturen. De Raspberry Pi wordt gevoed met een Micro USB kabel. De Raspberry Pi Cam wordt verbonden met de CSI-camera connector. Aan de Raspberry Pi is ook een beeldscherm gekoppeld door middel van een HDMI-kabel, maar ook een toetsenbord en muis die door middel van een USB-kabel zijn aangesloten. De Raspberry Pi staat ook in verbinding met een breadboard waarop een knop, de led strips en enkele micro servo motoren zijn aangesloten. Voor de communicatie van de Raspberry Pi naar de knop, de servomotoren en de led strip maak ik ook weer gebruik van Python.
Link foto: Hardware Blokschema
Python is een gemakkelijk te leren programmeertaal op hoog niveau voor algemene doeleinden. De ontwerpfilosofie benadrukt de leesbaarheid van de code met het gebruik van aanzienlijke inspringingen.
Bron: Wikipedia
Raspberry Pi is een serie kleine computers met één bord die in het Verenigd Koninkrijk is ontwikkeld door de Raspberry Pi Foundation in samenwerking met Broadcom. Het Raspberry Pi-project leunde oorspronkelijk op de bevordering van het onderwijzen van elementaire informatica op scholen en in ontwikkelingslanden.
Bron: Wikipedia
Visual Studio Code, ook wel VS Code genoemd, is een broncode-editor gemaakt door Microsoft met het Electron Framework, voor Windows, Linux en macOS. Functies omvatten ondersteuning voor foutopsporing, syntaxisaccentuering, intelligente codeaanvulling, fragmenten, coderefactoring en ingesloten Git
Bron: Wikipedia
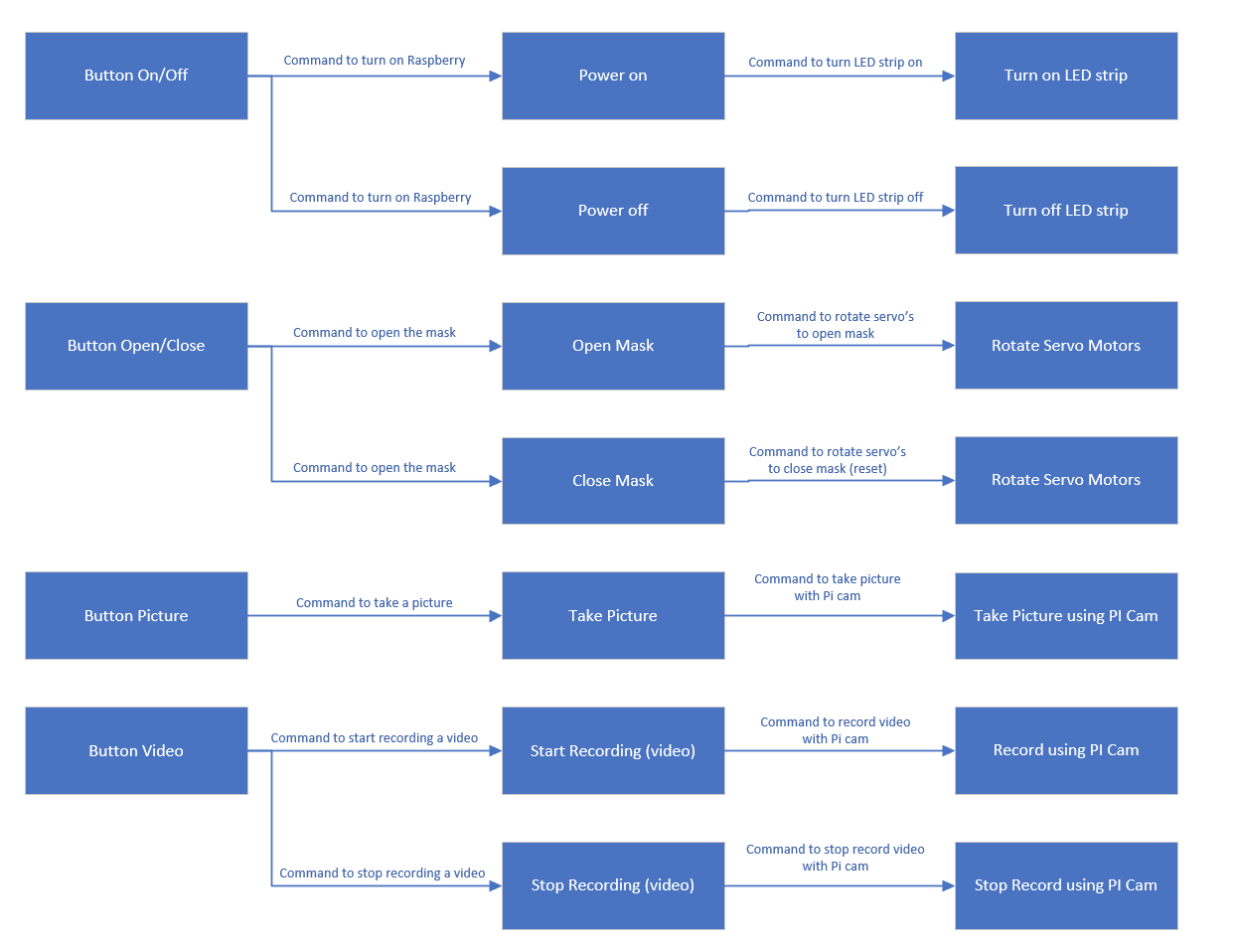
In deze flowchart krijgt u een versimpeld beeld van hoe het globaal in zijn werk zal gaan.
Link foto: Globale Flowchart Software
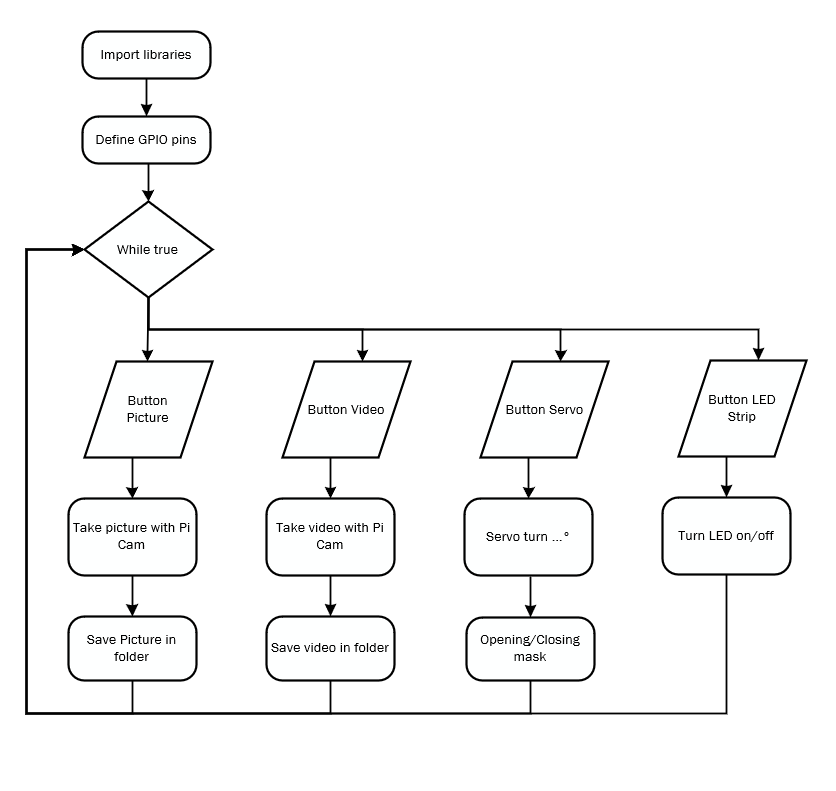
In de code importeer ik eerts de bibliotheken, daarna volgt de declaratie van de input en output pins (GPIO-pins). Vervolgens begint de code voor de verschillende knoppen, een knop voor een foto te nemen, een knop voor het opnemen van een video, een knop voor het aansturen van de led strip en een knop voor het openen en sluiten van het masker door gebruik te maken van de servomotoren.
Link foto: Flowchart Python Code
Een logboek is een excel document waarin wordt bijgehouden waar en aan wat ik in die bepaalde periode heb gewerkt.
Hierbij een afbeelding van mijn planning. Deze is gemaakt in het programma Gant Project, waarin je heel gemakkelijk een deadline kan markeren. De bedoeling hiervan is dat we zo leren inplannen op grote schaal en zo elk onderdeel in verschillende delen opsplitsen om het werk zo te verdelen over een periode.
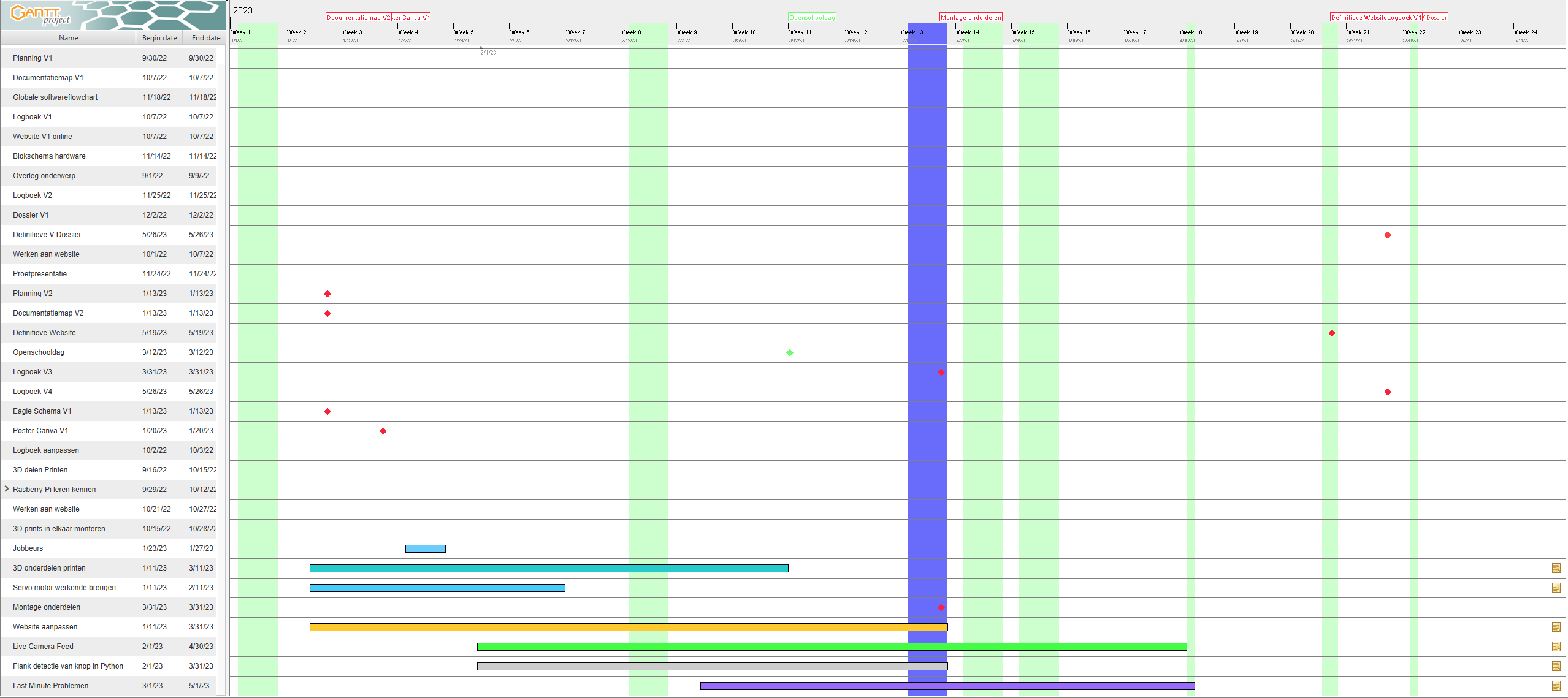
Link foto: Planning
SD Worx stimuleert succes in je onderneming, door talent te matchen met de jobs waarin ze floreren, hen te helpen leren en groeien, hen gepast te belonen, én hen de tijd en de middelen te geven om zich te focussen op het werk waarvoor ze het beste van zichzelf willen geven.
Site: sdworx
Als eindwerk maak ik een Iron Man Helmet bestaande uit 3D geprinte onderdelen en vele hardware componenten zoals een servomotor, een camera en een led strip.
In de loop van het project heb ik veel dingen bijgeleerd, dit dan vooral op het vlak van programmeren in een nieuwe taal. Python was een leuke en leerrijke omgeving wat dit project wel interessant maakte. Ook heb ik geleerd een structuur te brengen in de verbinding van hardware componenten. De software voor het 3D printen was voor mij wel geen nieuwe omgeving wat het dan wel al iets gemakkelijker maakte.
Tijdens het project kwam ik erachter dat het 3D printen toch wat meer tijd in beslag dan nemen dan waarop ik had gerekend waardoor er toch een lichte stress aanwezig was, ook de code om de servomotor aan te sturen was een handje vol. Als personalisering wou ik de helm nog een blinkende afwerking geven en eventuele meerdere lichtstanden voor de led strips. Het project was een leerrijke beleving waarin ik veel heb ontdekt en bijgeleerd.